

1、信息查詢與整合解決方案
1.1概述
大數(shù)據(jù)時代,人類活動所涉及的大數(shù)據(jù)80%以上與地理信息有關,且呈現(xiàn)海量、多源、異構、動態(tài)的特點,傳統(tǒng)技術體制在信息查詢與整合中存在以下問題:對實體對象空間位置的標識不唯一,查詢檢索效率低;對實體對象的標識不統(tǒng)一,信息的整合與共享困難;對結構化與非結構化數(shù)據(jù)進行統(tǒng)一組織管理存在重大障礙。以上不足互相關聯(lián)、互相影響,極大制約了現(xiàn)有信息系統(tǒng)效能的發(fā)揮,方案提出基于北斗網(wǎng)格碼的信息查詢與整合方式,使得數(shù)據(jù)查詢效率更高,數(shù)據(jù)整合更便捷。
1.2解決方案
在對現(xiàn)有系統(tǒng)不推倒不重來及保護現(xiàn)有數(shù)據(jù)庫獨立性的基礎上,充分利用數(shù)據(jù)中的“空間位置”屬性,增加北斗網(wǎng)格編碼字段,作為ID對各種數(shù)據(jù)進行統(tǒng)一標識,并以其為紐帶構建對象內(nèi)在的時空關聯(lián)關系,建立編碼動態(tài)索引,實現(xiàn)大數(shù)據(jù)統(tǒng)一組織與高效查詢。同時,利用網(wǎng)格編碼一維、整型、二進制的特點,實現(xiàn)時空大數(shù)據(jù)的計算、傳輸、分發(fā)、服務等應用的高效“編碼化操作”。
(1)統(tǒng)一標識
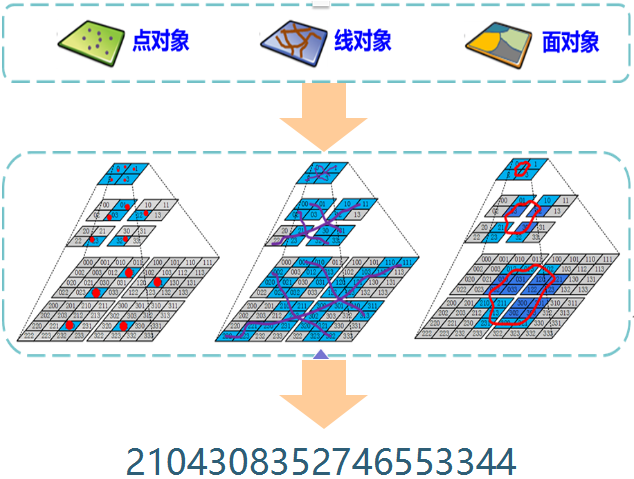
圖1 空間位置統(tǒng)一標識
(2)數(shù)據(jù)組織
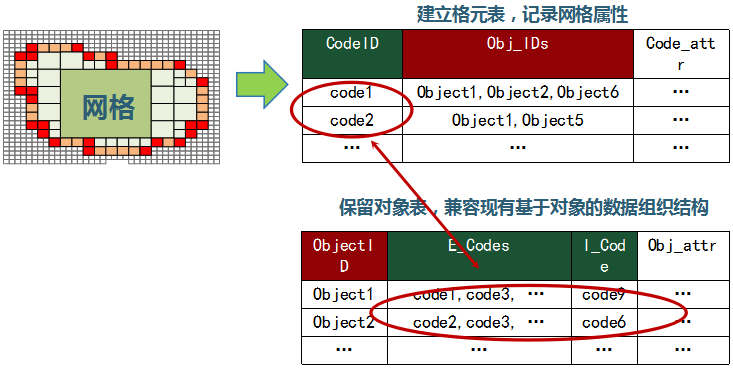
圖2 數(shù)據(jù)組織與關聯(lián)
(3)檢索與分析
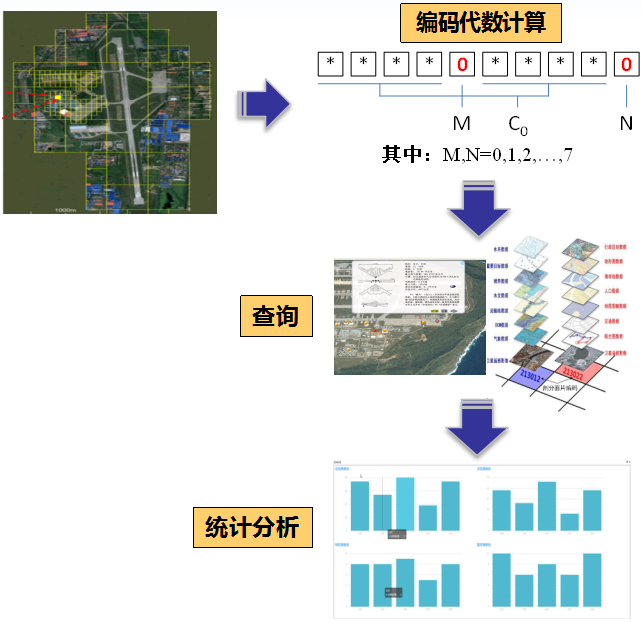
圖3 數(shù)據(jù)檢索與統(tǒng)計分析
1.3優(yōu)勢特點
(1)基于網(wǎng)格編碼的時空大數(shù)據(jù)快速整合和自動空間關聯(lián);
(2)數(shù)據(jù)檢索由多維時空查詢簡化為一維數(shù)值匹配查詢,效率大幅提升;
(3)空間計算由經(jīng)緯度浮點數(shù)運算轉化為基于二進制編碼的位運算,計算效率提升10倍左右。
2、三維路徑規(guī)劃解決方案
2.1概述
空間管控問題是軍航、民航、通航以及無人機航空業(yè)界備受關注的問題。隨著飛行器數(shù)量越來越多,特別是隨著低空領域的開放,空管壓力越來越大。飛行器運動規(guī)律變化復雜,航路規(guī)劃的計算遇到瓶頸,傳統(tǒng)方法普遍以經(jīng)緯度為基礎,通過解算三維曲線方程加安全裕度的方法,來實現(xiàn)對空間對象的航路規(guī)劃和管控,計算復雜度高,已無法適應飛行器快速增多的變化。方案基于北斗網(wǎng)格碼進行三維路徑的規(guī)劃,有效降低計算復雜度,使空間管控更加實時、高效。
2.2解決方案
用靜態(tài)立體網(wǎng)格承載三維空間信息,時間維作為變量,將空間內(nèi)有無人機的網(wǎng)格標記為1,沒有的標記為0;在三維靜止空間中,根據(jù)無人機之間安全飛行距離和飛行時間變量,找到任意一條和現(xiàn)有運動目標靜止軌跡(時空軌跡)不相交的立體網(wǎng)格直線(曲線)區(qū)域,反向轉換成無人機在三維立體空間的運動狀態(tài),即可規(guī)劃出任意動態(tài)的無人機飛行路徑,并能將飛行空域的利用率達到最大。

圖4 三維路徑規(guī)劃示意圖
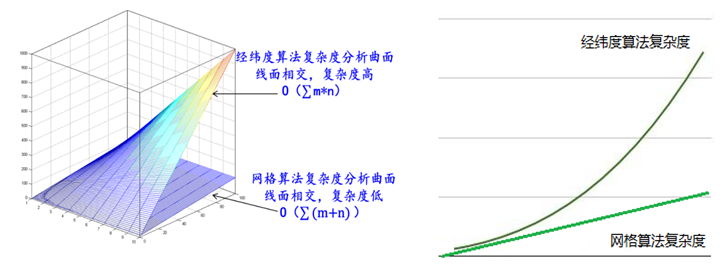
圖5 計算復雜度對比
2.3優(yōu)勢特點
(1)將復雜的浮點運算問題變成一個空間網(wǎng)格的匹配問題,空間飛行規(guī)劃計算效率提升10倍以上;
(2)保持空間計算效率的平衡,算法復雜度呈線性變化,不隨空間對象的數(shù)量、分布及運動規(guī)律的變化而變化;
(3)空域利用率提升1倍以上;
(4)具有全空域性,支持整個地球空間的空間管控。
3、高精度位置服務解決方案
3.1概述
目前高精度位置服務,其基本模式是“先請求、后計算、再服務”。這種模式在實際應用中存在著一些明顯的不足和短板。主要表現(xiàn)在:
(1) 用戶端:
移動終端需要持續(xù)消耗流量,使用成本高;
需頻繁進行數(shù)據(jù)交換和運算,耗電量大,待機時間縮短。
(2)服務端:
隨著用戶數(shù)的增加和精度的提高,后臺計算壓力增大,服務的實時性難以保證;
受通信帶寬的影響,同時服務的用戶數(shù)量受限。
3.2解決方案
將服務區(qū)域劃分成多個網(wǎng)格,解算每一網(wǎng)格的位置修正數(shù)并向外廣播。當用戶通過衛(wèi)星導航系統(tǒng)獲得自己的經(jīng)緯度位置后,會自動生成相應的北斗網(wǎng)格編碼,自動匹配并提取當前位置的修正數(shù),從而實時獲得精確的位置信息。

圖6 空間區(qū)域網(wǎng)格化
3.3優(yōu)勢特點
采用北斗網(wǎng)格技術,將目前復雜的“先請求、后計算、再服務”的串行、有源服務模式,變?yōu)楹唵蔚摹敖邮?匹配”的并行、無源服務模式,用戶體驗明顯改善:
(1)可同時服務的用戶量不受限制;
(2)幾乎不產(chǎn)生流量,大大降低用戶的使用成本;
(3)明顯降低用戶終端的功耗,提高待機時間;
(4)極大緩解服務商的計算壓力與通信帶寬壓力;
(5)后臺的計算與發(fā)播完全分離,信息單向傳輸,最大限度提高安全性。
4、無路網(wǎng)路徑規(guī)劃解決方案
4.1概述
現(xiàn)有導航應用軟件普遍以傳統(tǒng)的經(jīng)緯度為基礎,在地理信息系統(tǒng)上疊加矢量道路網(wǎng)數(shù)據(jù),實現(xiàn)為用戶導航的服務。如果沒有矢量網(wǎng)數(shù)據(jù),或矢量網(wǎng)數(shù)據(jù)不全,則無法提供正常的服務。因此,如何在矢量道路數(shù)據(jù)缺失的情況下實現(xiàn)路徑規(guī)劃,就成為導航應用領域亟待解決的重大問題。
4.2解決方案
通過天基、空基和地基等多種遙感和測繪手段,獲取道路、地形、高程、坡度、植被、河流、草地、耕地、DEM(數(shù)據(jù))、三維DTM(數(shù)字地面模型)、以及氣象水文等數(shù)據(jù),形成目標區(qū)域的多圖層地理信息庫。在各圖層地理信息庫生成的同時,按GeoSOT規(guī)則將數(shù)據(jù)信息剖分成合適尺度的網(wǎng)格,并給每個網(wǎng)格賦予北斗網(wǎng)格編碼,對現(xiàn)有的地理信息庫同樣增加北斗網(wǎng)格編碼。根據(jù)多圖層數(shù)據(jù),量化每一個空間網(wǎng)格對于規(guī)劃對象的可通過性,可將通過的網(wǎng)格標為1,不可通過的網(wǎng)格標為0,利用北斗網(wǎng)格碼的高效計算特性,快速得出該對象在目標區(qū)域可以通過的網(wǎng)格,進而規(guī)劃出合理的路線。
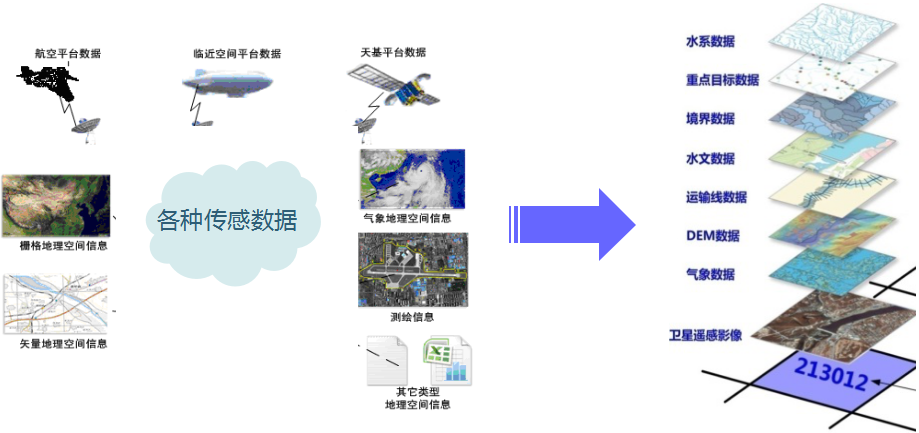
圖7 數(shù)據(jù)采集與組織
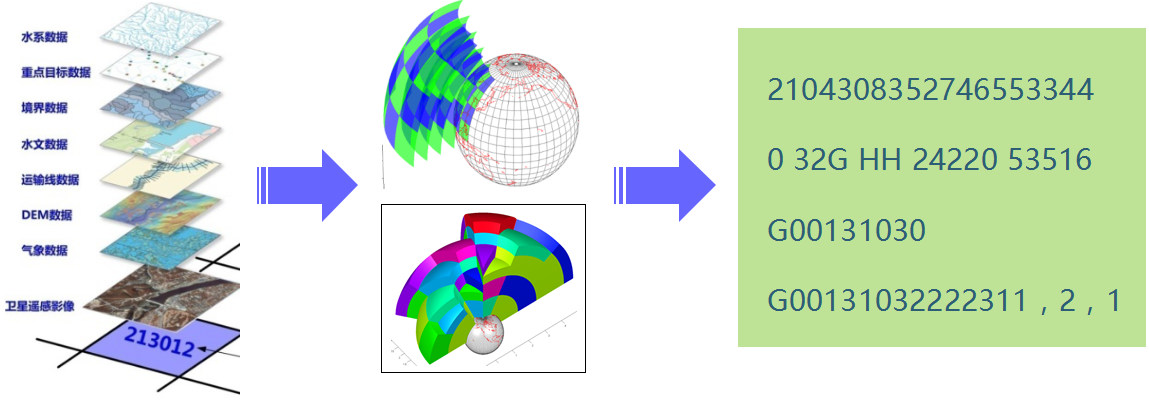
圖8 數(shù)據(jù)編碼

圖9 可通過性判別
4.3優(yōu)勢特點
(1)實現(xiàn)在無路網(wǎng)信息情況下的路徑規(guī)劃;
(2)優(yōu)化路網(wǎng)信息不全情況下的路徑規(guī)劃。




